5.3.1 用状态替换集合
尽管上述过程在输入长度上是线性的(下一个令牌需要的工作量与长度无关),但是对于每个令牌依旧需要做大量的工作。更糟的是,必须反复查询语法,因此解析的速度会被语法的大小影响。简而言之,我们为非确定性自动机设计了一个解释器,它很方便易懂,但是效率底下。
好在我们有可能从根本上改进它:从图Fig5.7中的NFA中,我们构建了一个新的自动机与一组新的状态集,其中每一个状态都相当于一个旧的状态集。如果原始自动机(非确定性)在第一个a之后不知接下来往哪边(我们用 {A,B}来表示的状态),那么新的自动机(确定性)将明确知道第一个a之后,它的状态就是AB。
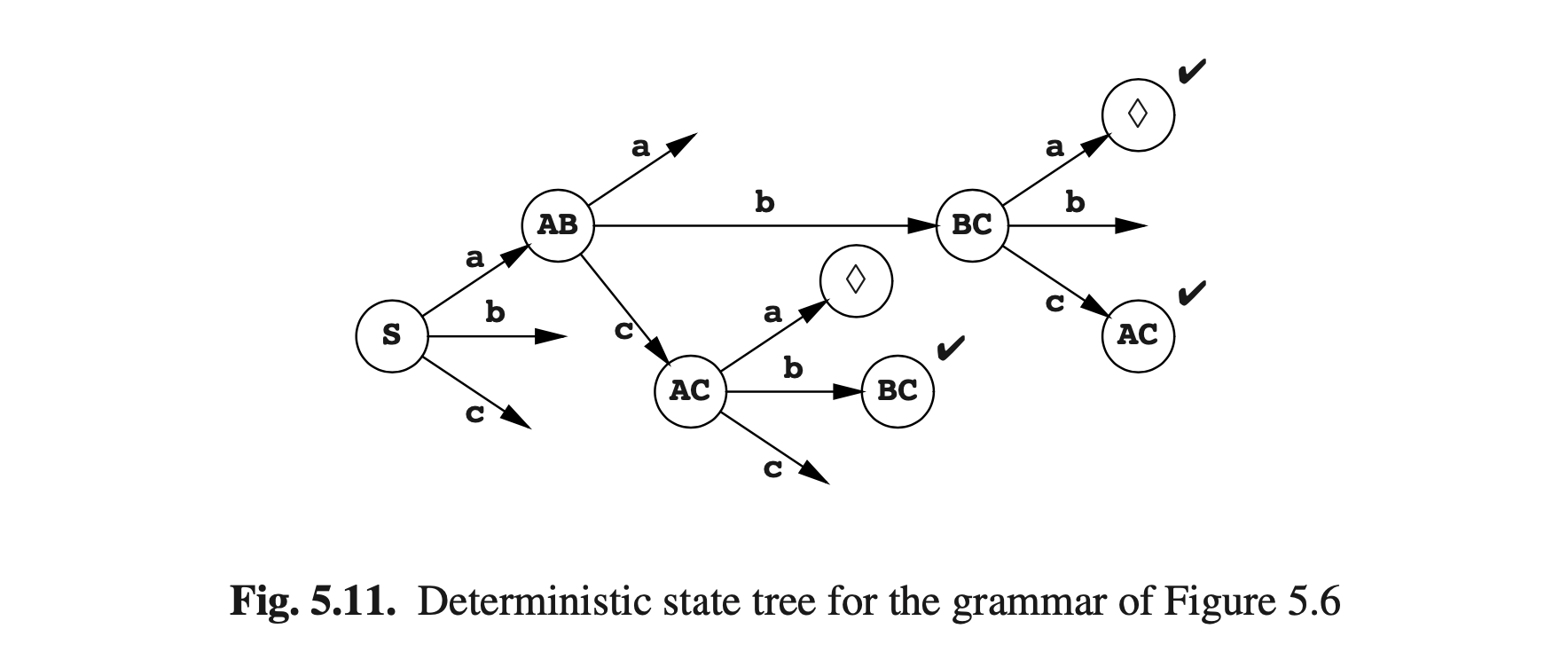
新的自动机状态可以系统的构建。我们从旧自动机的初始状态开始,这同样也是新自动机的初始状态。对于我们创建的每个新状态,我们根据旧状态检查其内容,对于语言中的每一个令牌我们决定给定集合导向哪个旧的状态集合。这些旧状态的集合将再次被视为新自动机的状态。如果我们再次撞见相同的状态,它将不会再次被分析。这个过程称为子集构造,并会产生一个(确定性)状态树。图Fig5.6的语法的状态树如图Fig5.11所示。为了强调它系统的检查所有符号的所有新状态,还显示了无向的连接弧线。新生成的但以前就存在的状态用✔标示了。
图Fig5.11的状态树通过将箭头指向✔标记过的状态(首次出现的)并删除死角而转变为一个转换图。新的自动机见图Fig5.12。它是确定性的,因此称为确定性有限状态自动机,简称DFA。
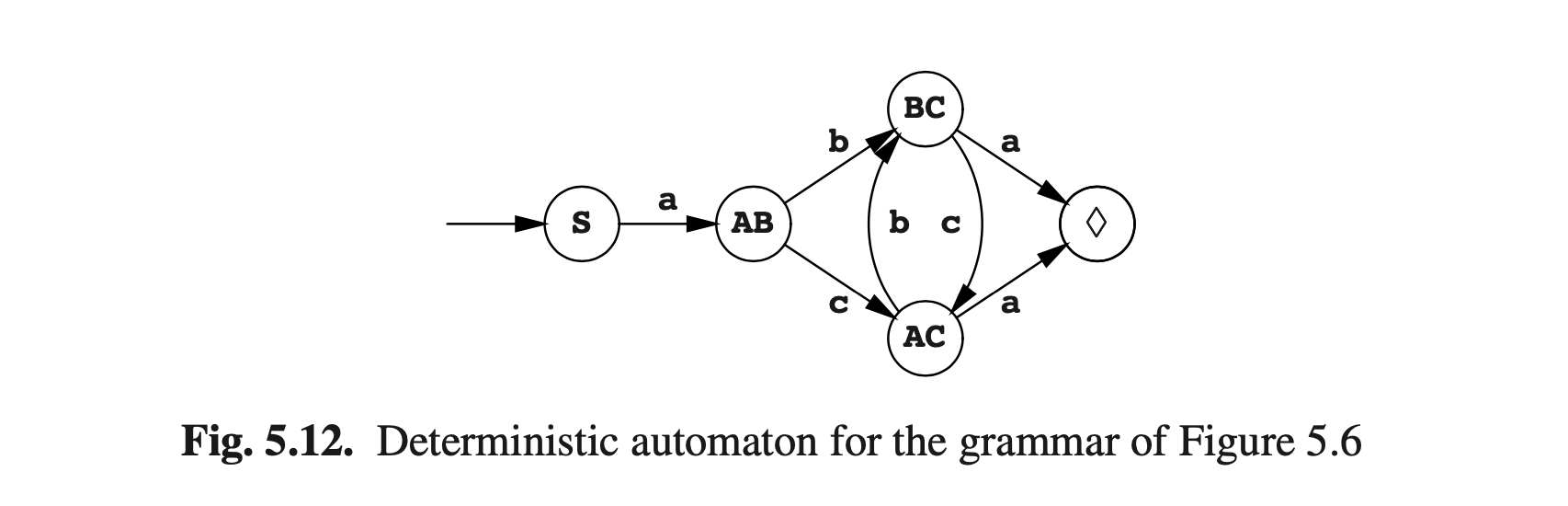
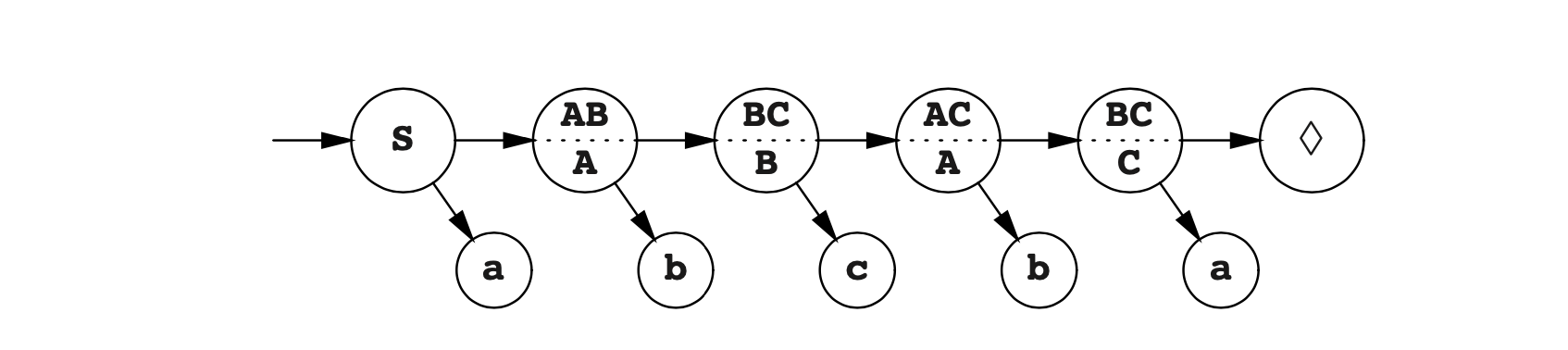
当我们现在使用句子abcba作为遍历此转换图的向导时,就会发现过程中不会产生任何疑惑并且顺利得到可接受状态。状态指出的每一条弧线都带有不通的符号,因此只要遵照符号表,我们始终都只会有一个方向。如果给定一个状态没有给定符号的指出箭头,则该符号可能不会出现在该位置。如果存在,则输入错误。
有两点要注意。首先,我们看到大多数可能的新自动机状态实际上并没有实现:旧状态机有5个状态,所有新自动机有25=32种可能状态,而实际上它的状态只有5种;像SB或者ABC这样的状态不会出现。这很正常,虽然n种状态的非确定性有限状态自动机变成DFA后,理论上有2 n状态,但是其中有些非常罕见并需要特别的构造出来。具有n种状态的NFA通常会产生少于或约等于10 × n状态的DFA。
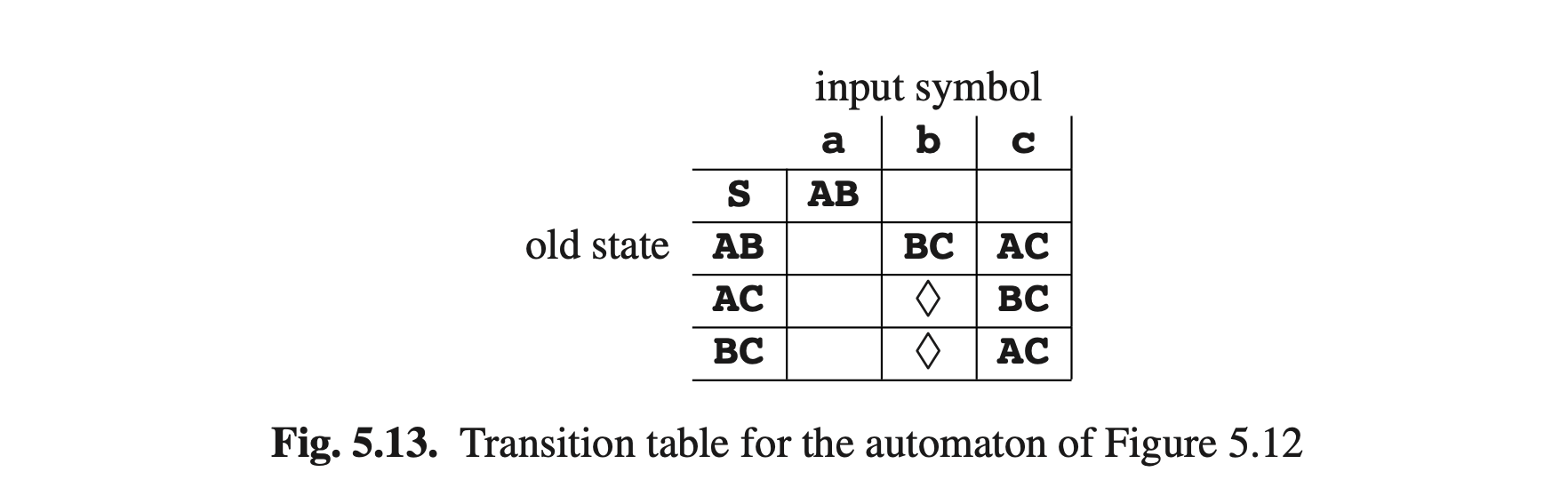
其次,不再需要查询语法;输入令牌的自动机状态完全确定了下一个状态。为了方便查询,下一个状态可以存储在由旧状态和输入令牌索引的表中。DFA的索引表见图Fig5.13.通过这个表,可以以很少的机器指令来完成检查输入字符串的每个令牌。对于大多数DFA,表中的大多数条目为空(无法通过正确的输入到达,并且指向错误状态)。由于表相当的大(300状态的100次方个令牌,是很普遍的大小),不过有几种技术来压缩为空的部分来减小表的大小。Dencker, Dürre 以及 Heuft [338]对这些技术做了一下调研。
获得的解析树如下:
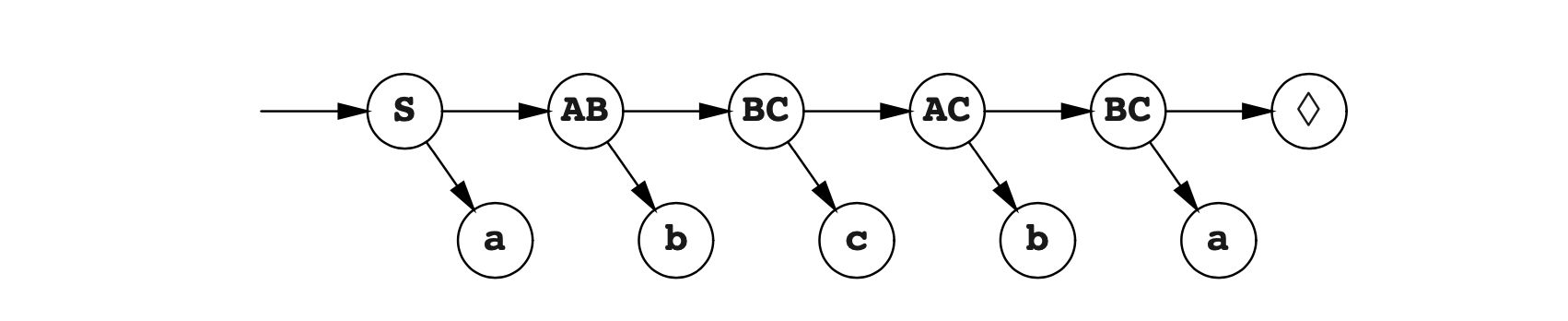
这不是原始的解析树。如果自动机仅用于识别输入字符串,是没有任何问题的。如果需要解析树,可以按照以下自底向上的方法来重建。从最后一个♦状态和令牌a开始,我们得出结论,最后一个右侧(自底向上解析的“句柄段”)是a。由于状态为BC,B和C的组合,我们看一下B和C的规则。我们会发现有一个派生是C->a,它简化了BC到C。最右侧的b和C组合成为句柄bC,其存在与A派生的集合 **{A,C}**中。用这个方式进行之后,我们就得到如下的解析:
这个方法又会重复查询语法;此外,回退的方式并不总是像上面的例子那么简单,我们将会得到不确定的语法。
对正则语法进行有效的全面解析,关注的人并不多;但是在Ostrand, Paull and Weyuker [144] and by Laurikari [151]的论文中可以找到很多有用的信息。